





经过分类和重命名,节点结构层次有很大的改善,方便了系统的读取。综上所述,完整的再现所需的运动,在每个铰链处需要绕Z轴旋转、平移,沿X轴平移三个自由度,其中对于中间排的铰链结构,X轴是两相邻铰链轴线公垂线方向,对于两侧排的铰链,X轴为两对称铰链轴线的公垂线方向。虚拟现实系统中的DOF实现在虚拟现实仿真中,物体的运动自由度是由节点控制。节点实质上是固结在物体特定部位的局部坐标系,通过限制物体沿该坐标系各轴的平移旋转来控制物体的空间自由度。为了实现所需的运动,需要在
铰链组成的上下杆件的联接孔轴线处分别建立节点坐标系,赋予不同运动参数实现运动。虚拟现实模型丧失原有的拓扑结构。这就为坐标系的定位带来不便。由于长杆零件为对称结构,所以对于中间排铰链的长杆部分,能够采用寻找物体中心点的方式定位坐标系。但对于其他铰链结构,该方法就失去作用。根据计算机图形学相关知识,计算机中圆的拟合采用外切或内接圆的正多边形实现。此种正多边形任意两条边的中垂线将相交于圆心。基于以上理论,对于不宜直接获取轴线的铰链结构,可首先采用边法线工具获取多边形的任两条边法线,再通过取交点工具取得圆心,完成坐标系的定位为采用相交法取圆心
点。双实现空间自由度在creator软件中坐标系默认固连物体,并随物体移动和转动。即快速伸缩机构在沿坐标系Z轴旋转的同时其X轴也随之旋转,法保证沿X轴的运动方向。采用双嵌套的方法,先建立平移在以其为父节点建立旋转,并将物体组节点放置在旋转之下。两节点分别控制平移和旋转。互不干扰,运动效果为两者叠加。经验证能够实现所需的运动效果。分别在每个铰链的上下杆件建立如上图所示的嵌套结构,并约束平移节点为沿X轴平移,约束旋转接点为绕Z轴旋转。同时定义两节点为沿Z平移(零部件拆装需要),完成节点编制工作。
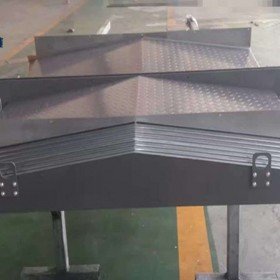
机床的导轨防护罩作为机床导轨、控制电机、传动丝杠、电缆等电气设备防护的重要部件,可以避免冷却液、切削铁屑等进入机床内部。另外,防护罩也起到机床外观的美化作用。因此,近年来机床的防护罩设计已经开始受到人们的重视。
机床防护罩进行结构设计时,有关参数比较重要,关系到防护罩的制作、安装等关键环节。机床防护罩主要结构参数包括防护罩拉伸最大长度、压缩最小长度、防护罩的节数、防护罩宽度等。另外,一些高速机床防护罩上使用了密封条而密封条使用寿命的计算会影响防护罩的保养、维护工作。因此,本文提出了机床防护罩的结构有关参数的计算方法和公式。这些参数的计算有助于防护罩的设计、生产和安装等环节。